常见问题:控制板参数怎么调节
硬件参数调节
GRBL参数调节
软件参数包括步进数(脉冲)、加速度、最大速度、是否启用限位等。
软件参数可通过软件来调节。不同软件有不同的调节页面和方法。
使用Candle软件的命令行调节方法
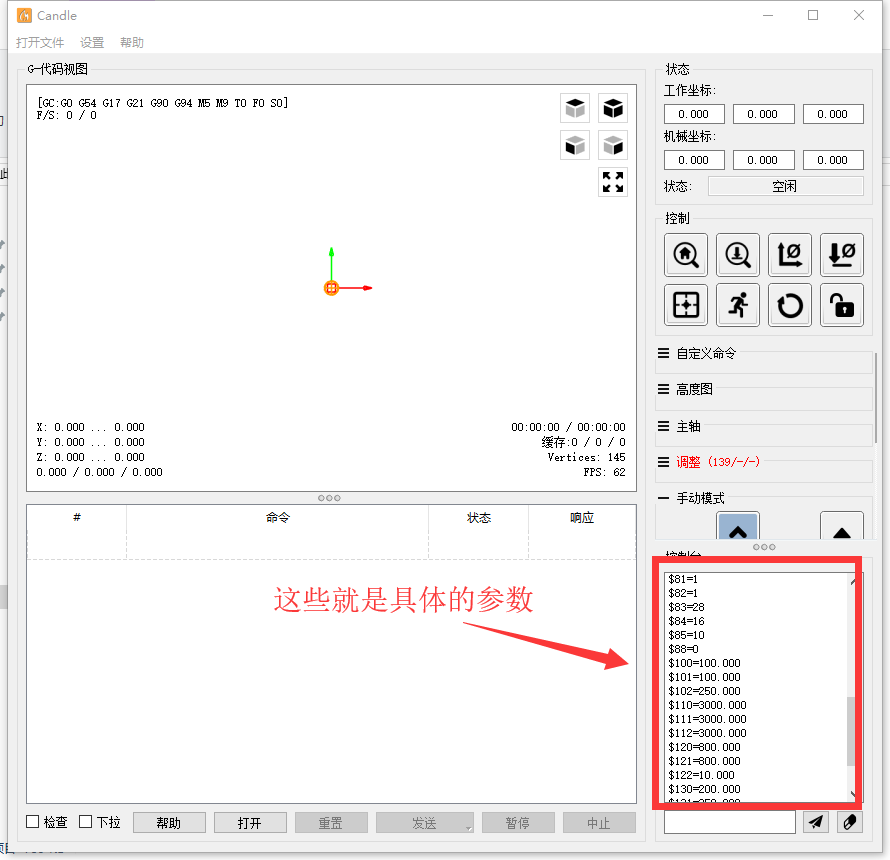
在Candle软件的命令行中输入$$命令,可以列出当前的所有参数。

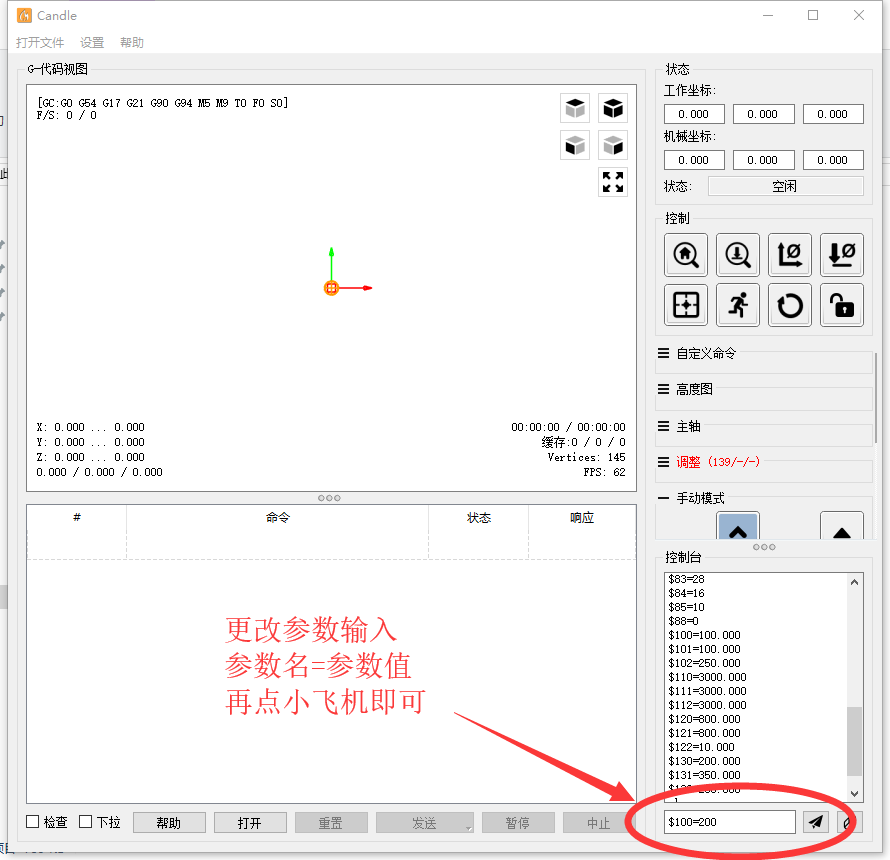
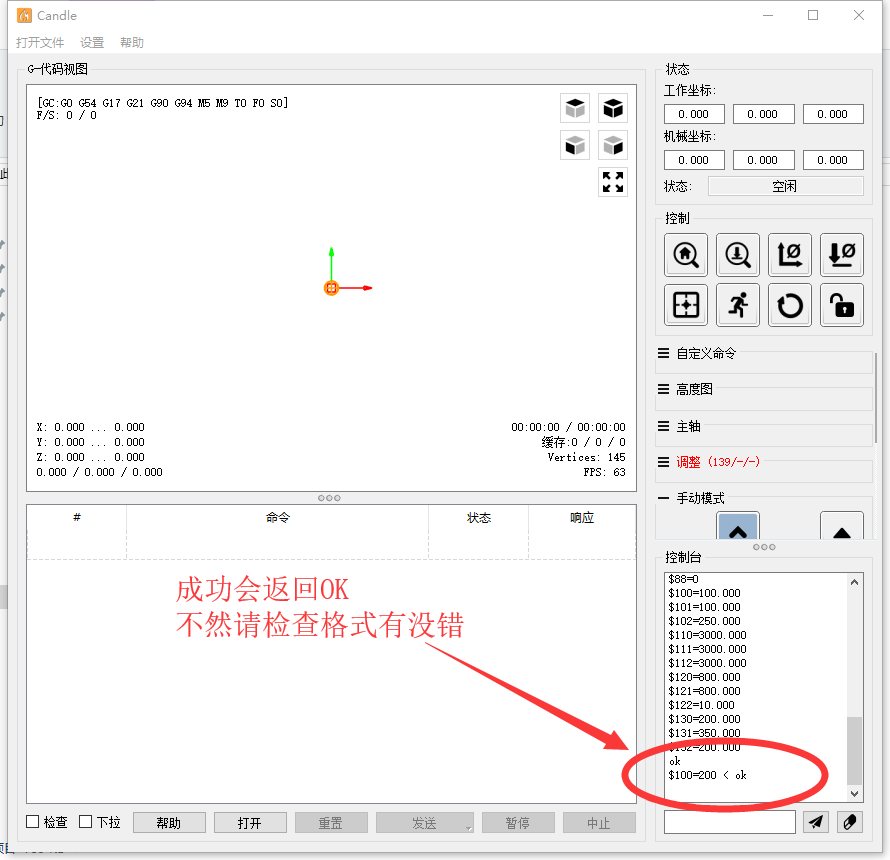
要修改某一项,如$100输入命令 $100=新数值, 即可。
这里的参数名都是$100这样来表示,具体的含义,请上GRBL官网查询。 点这里。
https://github.com/gnea/grbl/wiki/Grbl-v1.1-Configuration
这里翻译几个常见的参数给大家,不常见的参数,建议大家不要随便更改。
| Settings and sample values | Description | 翻译 |
|---|---|---|
| $0=10 | Step pulse, microseconds | |
| $1=25 | Step idle delay, milliseconds | 步进电机空闲时释放力矩时间,255是一直保持 |
| $2=0 | Step port invert, mask | |
| $3=0 | Direction port invert, mask | 反转方向标志 |
| $4=0 | Step enable invert, boolean | |
| $5=0 | Limit pins invert, boolean | 限位逻辑反转标志 |
| $6=0 | Probe pin invert, boolean | 对刀逻辑反转标志 |
| $10=1 | Status report, mask | |
| $11=0.010 | Junction deviation, mm | |
| $12=0.002 | Arc tolerance, mm | |
| $13=0 | Report inches, boolean | |
| $20=0 | Soft limits, boolean | 是否启用软件最大行程限制 |
| $21=0 | Hard limits, boolean | 是否启用硬件限位 |
| $22=1 | Homing cycle, boolean | 是否启用$H回限位操作 |
| $23=0 | Homing dir invert, mask | 回限位时的方向,一般我们设置为3 |
| $24=25.000 | Homing feed, mm/min | |
| $25=500.000 | Homing seek, mm/min | |
| $26=250 | Homing debounce, milliseconds | |
| $27=1.000 | Homing pull-off, mm | |
| $30=1000. | Max spindle speed, RPM | 主轴最大转速 |
| $31=0. | Min spindle speed, RPM | 主轴最小转速 |
| $32=0 | Laser mode, boolean | |
| $100=250.000 | X steps/mm | X步进电机的步进数,走1mm脉冲数 |
| $101=250.000 | Y steps/mm | Y电机的步进数 |
| $102=250.000 | Z steps/mm | Z电机的步进数 |
| $110=500.000 | X Max rate, mm/min | X轴最大限速 |
| $111=500.000 | Y Max rate, mm/min | Y轴最大限速 |
| $112=500.000 | Z Max rate, mm/min | Z轴最大限速 |
| $120=10.000 | X Acceleration, mm/sec2 | X轴加速度 |
| $121=10.000 | Y Acceleration, mm/sec2 | Y轴加速度 |
| $122=10.000 | Z Acceleration, mm/sec2 | Z轴加速度 |
| $130=200.000 | X Max travel, mm | X轴最大行程 |
| $131=200.000 | Y Max travel, mm | Y轴最大行程 |
| $132=200.000 | Z Max travel, mm | Z轴最大行程 |
除了用Candle软件来更改,还有更方便的方法可以更改常见参数。 那就是用我们的Bachin Master软件。
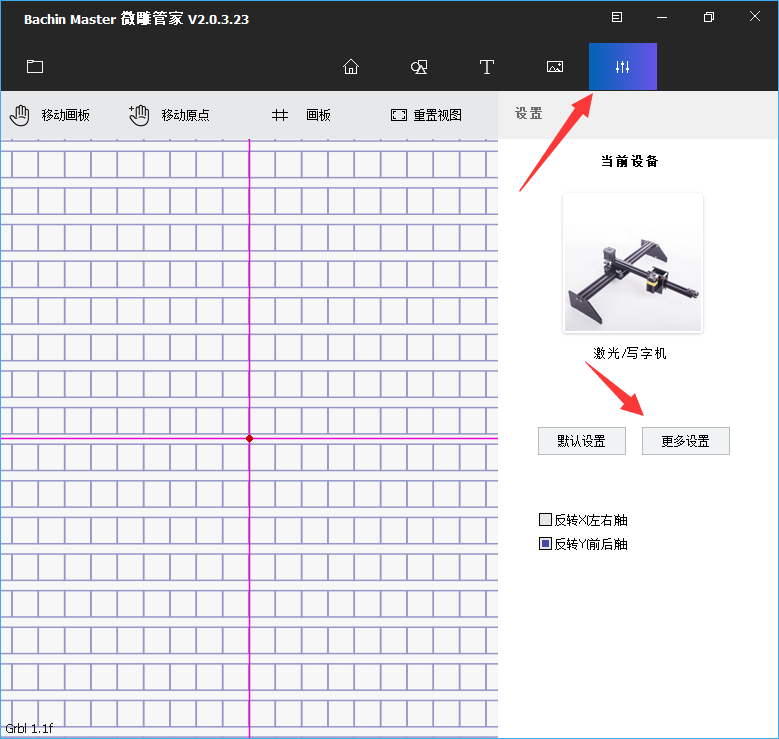

请尽量用Bachin Master来改。 万用用Candle更改参数,设置了错误值,导致异常,可以发送命令$RST=*恢复默认参数。